hydrac.instruments.ub_mes¶
UB-MES instruments (hydrac.instruments.ub_mes)¶
-
class
hydrac.instruments.ub_mes.UB_MES(name)[source]¶ Bases:
hydrac.instruments.acoustique.AcousticUB-MES instrument class.
Base class :
hydrac.instruments.acoustique.AcousticThe UB_MES class reads the raw binary .udt files from UB-MES instruments and stores the valuable information into the
parammodified dictionnary with the common shape handled by hydrac (seehydrac.instruments.acoustique).When loading the raw data files, the user is prompted with extra informations. This instrument indeed works in bistatic configuration. This configuration can be changed from one measurement to the other, while keeping the same electronics. Each file thus must be completed with user input distance (\(d_{0}\)) from the emitter and reciever, as well as bistatic angle between the principal axes of the emitter and receivers (\(\gamma\)) (see image below). This information will allow to convert the travel times recorded by the instrument in terms of ranges over the vertical.
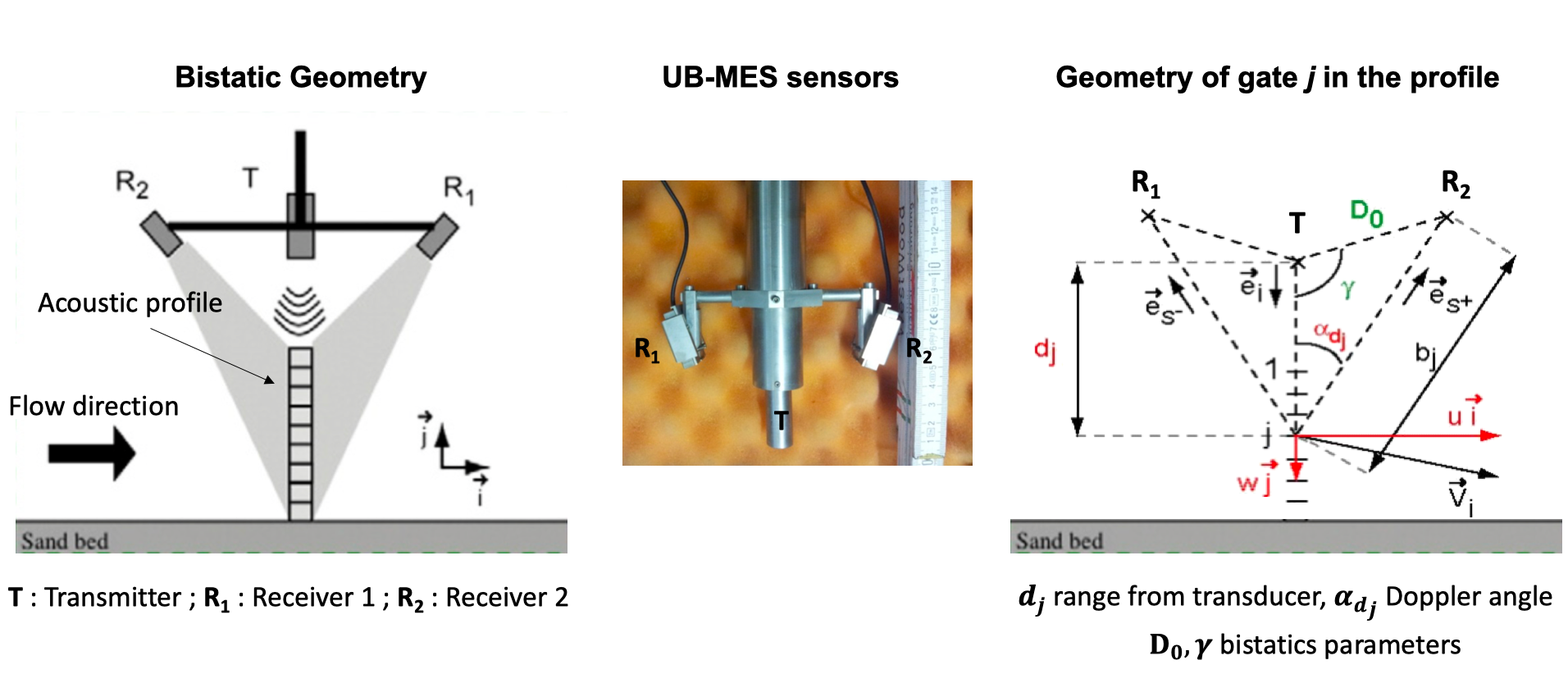
Bistatic instruments are more delicate to use than monostatic ones, as a cell is not solely defined by half sound speed in water times the wave travel time from the emitter to this cell (\(r = \frac{ct}{2}\)). For bistatic instruments, a cell is defined by the region in space where the travel time from the emitter to the cell and back to one receiver is constant. It is an ellipsoïd surface centered on the emitter (E) - receiver (R) (for one couple E-R) axis (\(ct_{j} = d_{j} + b_{j}\), see figure above). The distance from the emitter to the cell j is thus given by :
\[d_j = \frac{d_0^2-(ct_j)^2}{2(d_0cos\gamma-ct_j)}\]The way the data are to be considered is similar to the example shown in
hydrac.instruments.aquascat, except the user will be prompted for the geometric configuration of the sensors beforehand.Parameters: - name : str, {‘Campaign_1’}
Tag name, for personal usage, for instance to add a campaign name.
-
_load_settings(self, currpath=None)[source]¶ Data files from the UB_MES are two fold. One contains the data, the other contains the settings of the instrument (ex. ping rate, pulse length…). This function loads the settings from the setting file associated to the udt file. The setting file is an xml file, that is read here using the
hydrac.util.paramcontainer.ParamContainerclass.
-
_set_calib_ubmes(self)[source]¶ see
hydrac.instruments.aquascat.Aquascat._set_calib_aqa(). In addition here, as working with a bistatic instrument, the Kt value will change range as depending on the product of the transducers beam patterns. The Kt is thus a refined array of Kts with respect to the range from the emitter, proper to a bistatic configuration. This vector can be interpolated at the ranges determined by the current settings (that can evolve given the pulse length, speed of sound in water…)
-
_update_calib_ubmes(self, a, b=None, remove_elem=False)[source]¶ see
hydrac.instruments.aquascat.Aquascat._update_calib_aqa()
-
param_shape_UB(self, inp)[source]¶ Reshapes the modified dictionnary
paramto fit the standard key names and data shape used throughout hydrac
Classes
UB_MES(name) |
UB-MES instrument class. |
Exceptions
SettingsAmbiguity |